Motor de Inducción:
Introducción
Las máquinas asíncronas tienen un circuito magnético sin polos salientes estando ranurados tanto el estator como el rotor, los cuáles van a estar sometidos a la acción de campos magnéticos giratorios que darán lugar a pérdidas magnéticas. En consecuencia, ambos órganos de la máquina se fabrican a base de apilar chapas delgadas de acero al silicio para reducir estas pérdidas. Están formados por dos armaduras con campos giratorios coaxiales: una es fija, y la otra móvil. También se les llama, respectivamente, estator y rotor
El motor asíncrono construcción:
Estator
El devanado del estator normalmente es trifásico, aunque en máquinas de pequeña potencia también puede ser monofásico o bifásico. El devanado del rotor siempre es polifásico. Ambos devanados tienen el mismo número de polos (2p).
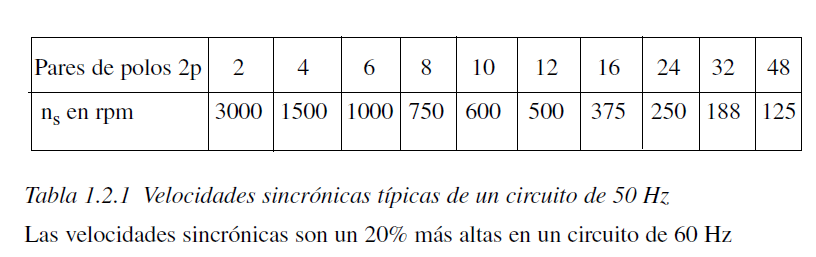
Para el número de pares de polos más pequeño 2p = 2 en un circuito de 50 Hz, la velocidad sincrónica más alta es ns = 3000/min-1. Las velocidades sincrónicas de un circuito de 50 Hz se indican en la Tabla 1.2.1.

Rotor
El devanado del rotor forma un circuito cerrado por el que circulan corrientes inducidas por el campo magnético. El rotor puede ser de dos tipos: de jaula de ardilla o en cortocircuito y de rotor bobinado o con anillos
- Devanado jaula de ardilla
Una jaula de ardilla es un devanado formado por unas barras alojadas en las ranuras del rotor que quedan unidas entre sí por sus dos extremos mediante sendos aros o anillos de cortocircuito. El número de fases de este devanado depende de su número de barras.
Muchas veces estos anillos poseen unas aletas que facilitan la evacuación del calor que se genera en la jaula durante el funcionamiento de la máquina.
- El rotor bobinado
El rotor bobinado tiene un devanado trifásico normal cuyas fases se conectan al exterior a través de un colector de tres anillos y sus correspondientes escobillas. En funcionamiento normal estos tres anillos están cortocircuitados (unidos entre sí).

En ambos tipos de rotor se suelen emplear ranuras ligeramente inclinadas con respecto al eje de la máquina.
El bloque de chapas que forma el circuito magnético del rotor tiene un agujero central donde se coloca el eje o árbol de la máquina. En muchas ocasiones se coloca un ventilador en este eje para facilitar la refrigeración de la máquina.
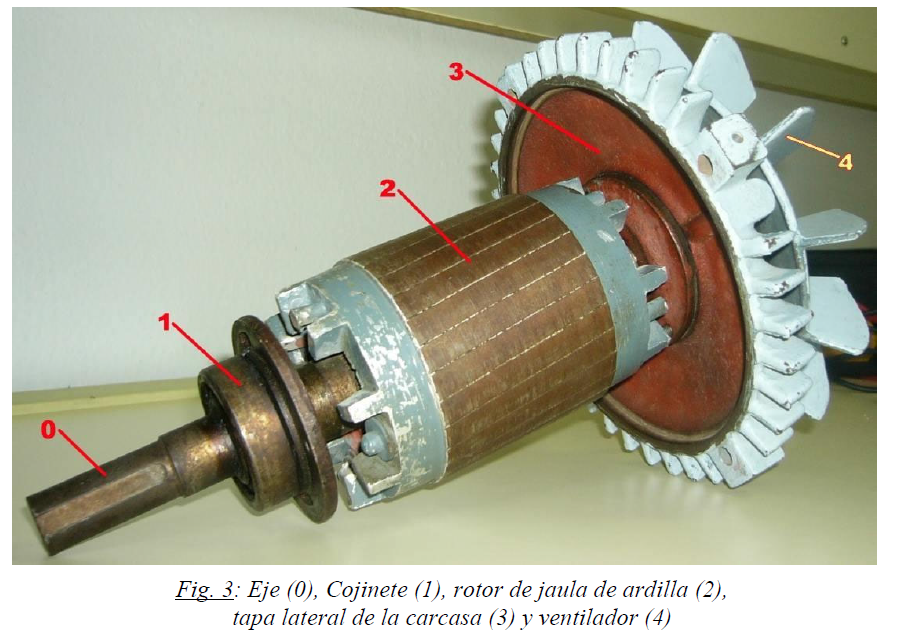
La carcasa es la envoltura de la máquina y tiene dos tapas laterales donde se colocan los cojinetes en los que se apoya el árbol. Esta carcasa suele disponer de aletas para mejorar la refrigeración de la máquina. Sujeta a la carcasa está la placa de características donde figuran las magnitudes más importantes de la máquina. En la carcasa se encuentra también la caja de bornes a donde van a parar los extremos de los bobinados. En una máquina asíncrona trifásica de jaula de ardilla la caja de bornes tiene seis terminales, correspondientes a los extremos de las tres fases del estator (dos extremos, principio y final, por cada fase), formando dos hileras de tres. De esta forma resulta fácil el conectar el devanado del estator en estrella) o en triángulo.


Esta facilidad para conectar en estrella o en triángulo el devanado del estator permite que una máquina asíncrona pueda funcionar con dos tensiones asignadas de línea distintas, que guardan entre sí una relación 3 .
Así, por ejemplo, un motor de 400/230 V tiene una tensión asignada de fase de 230 V.
Por esta razón, cuando se quiera utilizar en una red cuya tensión de línea sea 230 V se empleará la conexión triángulo, porque en ella las tensiones de fase y de línea son iguales. Si se quiere utilizar esta máquina en una red cuya tensión de línea sea 400 V deberá emplearse la conexión estrella, porque en ella la tensión de fase es igual a la tensión fase-neutro, la cual es 3 veces menor que la tensión de línea.
En resumen, la posibilidad de cambiar de conexión en el estator permite funcionar a la máquina asíncrona con dos tensiones asignadas de línea diferentes. La menor corresponde a la conexión triángulo y es también igual a la tensión asignada de fase. La mayor corresponde a la conexión en estrella.
PRINCIPIO DE FUNCIONAMIENTO
En este tipo de máquina el bobinado del estator está recorrido por un sistema equilibrado de corrientes que da lugar, en virtud del Teorema de Ferraris, a un campo magnético giratorio cuya velocidad es la conocida como velocidad de sincronismo. Cuando esta velocidad se mide en r.p.m. se la denomina n1 y se calcula a partir de la frecuencia f1 de las corrientes del estator mediante este cociente
Como el rotor gira a una velocidad diferente de la del campo magnético del estator, sus bobinas están sometidas a la acción de un flujo magnético variable y se inducen f.e.m.s de rotación en ellas. El devanado del rotor está en cortocircuito, luego estas f.e.m.s producen la circulación de corrientes en el rotor que, al interactuar con el campo magnético del estator, originan un par en el eje de la máquina. Por la Ley de Lenz, este par mecánico intentará reducir las variaciones de flujo magnético en el devanado del rotor y, por lo tanto, tratará de hacerlo girar a la misma velocidad que el campo magnético giratorio (ya que las variaciones de flujo en las bobinas del rotor son debidas al movimiento relativo del campo giratorio con respecto al rotor), pero sin conseguirlo nunca, ya que entonces no habría corrientes en el rotor ni, por consiguiente, par en el eje de la máquina.
La velocidad de estas máquinas es, pues, ligeramente distinta de la de sincronismo, de ahí su nombre de asíncronas. Por otra parte, las corrientes que circulan por el rotor aparecen por inducción electromagnética, de ahí su otro nombre de máquinas de inducción.
Cuando la máquina actúa como motor, su funcionamiento más habitual, la velocidad del rotor es inferior a la de sincronismo y se genera un par motor. Para que esta máquina actúe como generador es preciso moverla con una máquina motriz externa de forma que su velocidad supere a la de sincronismo. En este caso aparece un par de frenado en su eje.
Se denomina deslizamiento s a la siguiente relación:
Clasificación de los motores de inducción
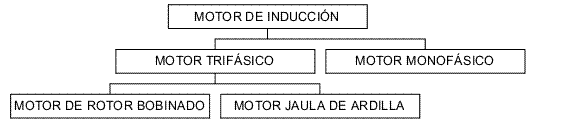
El motor trifásico se puede clasificar de acuerdo al tipo de rotor ya sea motor bobinado o motor jaula de ardilla.
Clasificación de motores monofásicos.
Debido a que los motores monofásicos de inducción no generan por sí solos par de arranque, se tienen dos devanados: el de marcha o principal; y el auxiliar o de arranque, cuya finalidad es producir el giro del rotor.
Tanto el devanado principal como el auxiliar, están distribuidos en ranuras espaciadas uniformemente alrededor del estator; sin embargo, el último se encuentra alojado en ranuras con orientación desplazada 90° en el espacio eléctrico con respecto a las del devanado principal
Un motor monofásico de inducción no tiene par de arranque intrínseco. Existen tres técnicas para lograr que uno de los dos campos magnéticos giratorios sea más fuerte que el otro en el motor y, en consecuencia, dar un apoyo inicial en una u otra dirección:
1. Devanados de fase partida.
2. Devanados con capacitor.
3. Polos estatóricos sombreados.
Motores de fase partida y arranque por resistencia.
El devanado de arranque tiene menos vueltas y consiste en alambre de cobre de menor diámetro que el devanado de marcha. Por lo tanto, el devanado de arranque tiene alta resistencia y baja reactancia. A la inversa, el devanado de marcha, con más vueltas de alambre más grueso, tiene baja resistencia y alta reactancia; pero debido a su impedancia total menor, la corriente en el devanado de marcha es en general mayor que la correspondiente en el devanado de arranque
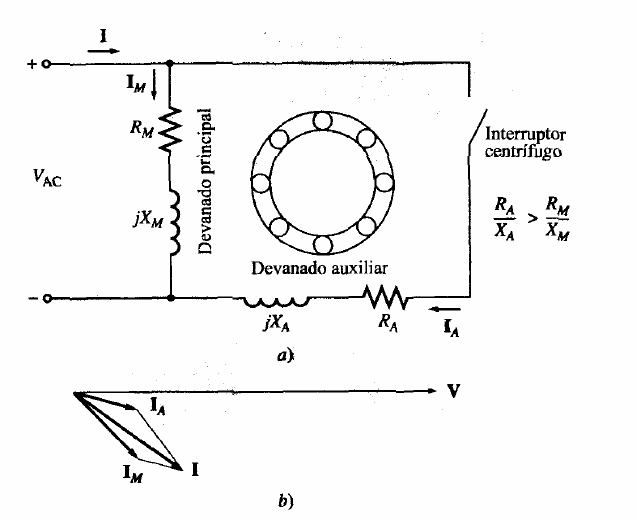
En la figura se aprecia mejor la función del devanado auxiliar. Debido a que la corriente en el devanado auxiliar adelanta a la corriente del devanado principal, el campo magnético BA alcanza su máximo valor antes que el campo magnético principal BM. Dado que BA llega a su valor pico primero que BM, en el campo magnético hay una rotación neta en sentido opuesto a las manecillas del reloj.
En otras palabras, el devanado auxiliar logra que uno de los campos magnéticos estatóricos rotacionales opuestos sea mayor que el otro y provee un par de arranque neto para el motor
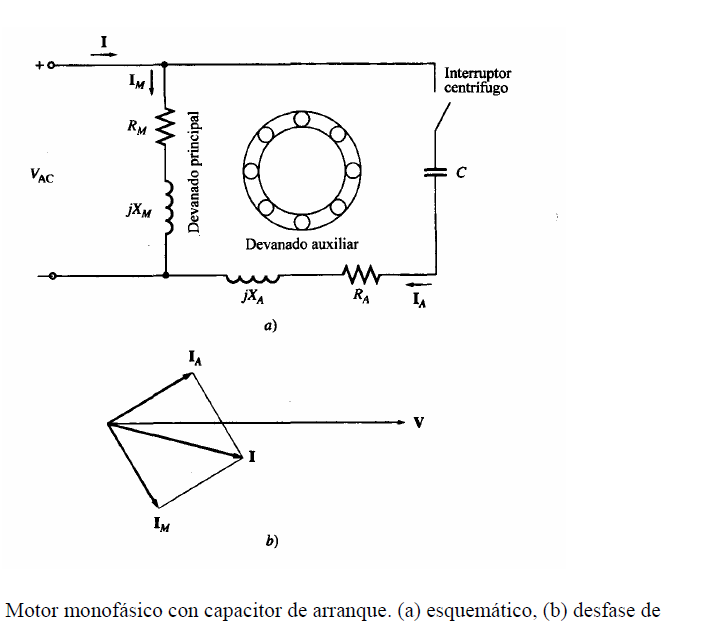
Motor de arranque por capacitor.
Como medio de mejorar el par relativamente bajo del motor de fase partida se agrega un capacitor al devanado auxiliar para producir una relación casi real de 90° entre las corrientes de los devanados de arranque y de marcha, en lugar de aproximadamente 25°, elevando el par de arranque a los límites normales del par nominal . La figura muestra el diagrama de conexiones del motor de arranque por capacitor, cuya diferencia implica la adición de un capacitor en el devanado auxiliar. Se puede advertir también a partir de la figura el mejoramiento del torque de partida debido a la inclusión del capacitor.
En virtud de su mayor par de arranque, los motores de fase partida y arranque por capacitor se emplean para bombas, compresores, unidades de refrigeración, acondicionadores de aire y lavadoras grandes, en los que se necesita un motor monofásico que desarrolla alto par de arranque bajo carga y cuando se requiere un motor reversible
Motor con capacitor de arranque y de marcha.
El motor de capacitor de marcha tiene un punto débil importante que es su bajo par de arranque. El motor de capacitor de arranque y de marcha, combina las ventajas de funcionamiento casi sin ruido y de control limitado de velocidad del capacitor de marcha con el alto par de arranque del motor de arranque por capacitor. Se emplean dos capacitores durante el periodo de arranque. Uno de ellos, el capacitor electrolítico de arranque, semejante al que se usa para el trabajo intermitente del motor de arranque por capacitor, tiene una capacitancia bastante alta, de 10 a 15 veces el valor del capacitor de marcha y se saca del circuito mediante un interruptor centrífugo al alcanzar el 75% de la velocidad síncrona y con ello produce el par de arranque necesariamente alto .
Entonces el motor continúa acelerando como motor de un capacitor, con el valor óptimo de la capacitancia del dispositivo de aceite para trabajar en la carga nominal o cerca de ésta. La ventaja principal del motor de capacitor de dos valores es su alto par de arranque, aunado al trabajo poco ruidoso y al buen par de funcionamiento. Se clasifica como motor invertible porque cuando las terminales de la línea de un devanado se invierten, se pone a trabajar en reversa del modo acostumbrado.
Motor de Polos Sombreados
Todos los motores monofásicos que se describieron anteriormente emplean estatores con entrehierros uniformes con respecto a sus devanados de rotor y estator, que están distribuidos uniformemente por la periferia del estator. Los métodos de arranque se basan en general en el principio de la fase partida de producir un campo magnético rotatorio para iniciar el giro del rotor.
La gran ventaja de este motor estriba en su extrema simplicidad: un devanado monofásico de rotor, rotor con jaula de ardilla vaciada y piezas polares especiales.
La figura muestra la construcción general de un motor de polos sombreados (dos polos salientes). Las piezas polares especiales se forman con laminaciones y una bobina de sombreado en cortocircuito, o bien un anillo de cobre macizo de una sola vuelta, alrededor del segmento más pequeño de la pieza polar. La bobina de sombreado está separada del devanado principal de ca y sirve para proveer una división de fase del flujo principal del campo, demorando el cambio de flujo en el segmento menor.
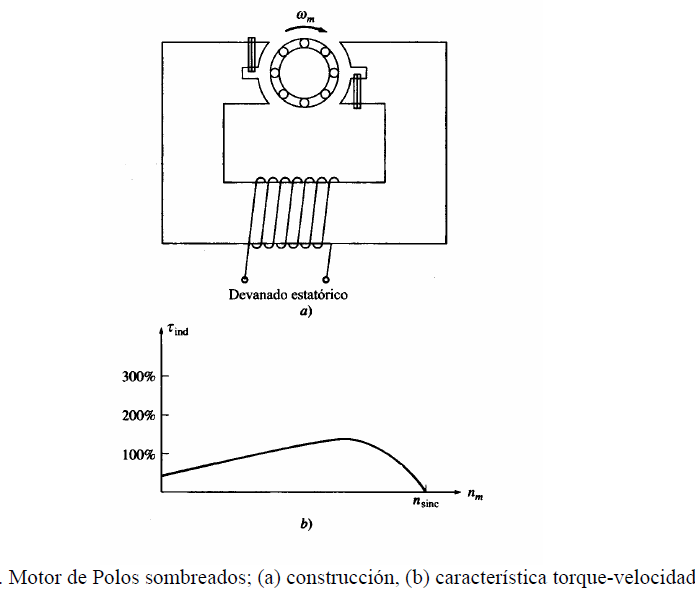
El flujo en el segmento del polo sombreado siempre está en retraso al correspondiente en el segmento principal, tanto en tiempo como en espacio físico, aunque no existe entre ellos una verdadera relación de 90°. El resultado es que se produce un campo magnético rotatorio, suficiente para originar un pequeño desbalanceo en los pares del rotor, tal que el par en el sentido de las manecillas del reloj es mayor que el contrario, o viceversa, y el rotor siempre gira en la dirección del campo rotatorio
Clases de diseño de motores de inducción.
La National Electric Manufacturers Association (NEMA) y la International
Electrotechnical Comision (IEC), han desarrollado un sistema de identificación mediante letras para los motores comerciales, según las curvas características par-velocidad para cada diseño:
DISEÑO CLASE A. Es un motor de jaula de ardilla para usarse a velocidad constante.
Sus principales características son:
- Buena capacidad de disipación de calor.
- Alta resistencia y baja reactancia al arranque.
- El par máximo está entre 200% y 300% del par de plena carga y ocurre a un bajo deslizamiento.
- Aceleración bastante rápida hacia la velocidad nominal.
- Presenta la mejor regulación de velocidad, entre el 2 y 4%.
- Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la corriente nominal. Han sido reemplazados por los motores de diseño clase B en los últimos años.
- Se utilizan en ventiladores, sopladores, bombas, tornos, etc.
CLASE B.
Se les llama motores de propósito general y a este tipo pertenecen la mayoría de los motores con rotor de jaula de ardilla. A continuación se resumen sus características:
- Par de arranque normal, baja corriente de arranque y bajo deslizamiento.
- Produce casi el mismo par de arranque que el diseño anterior.
- El par máximo es mayor o igual al 200% el par de carga nominal.
- Deslizamiento bajo (menor del 5%).
- Se prefieren sobre los diseños de clase A por requerir poca corriente de arranque.
DISEÑO CLASE C.
- Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de arranque (de 3.5 a 5 veces la nominal).
- Son construidos con un rotor de doble jaula (más costosos).
- Bajo deslizamiento (menos del 5%) a plena carga.
- Debido a su alto par de arranque, acelera rápidamente.
- Cuando se emplea con cargas pesadas, se limita la disipación térmica del motor, ya que la mayor parte de la corriente se concentra en el devanado superior.
- Tiende a sobrecalentarse con arranques frecuentes.
Se utilizan para cargas con altos pares de arranque, compresores y transportadores.
DISEÑO CLASE D.
- También conocidos como de alto par y alta resistencia.
- Alto par de arranque (275% o más del nominal) y baja corriente de arranque.
- Alto deslizamiento a plena carga.
- La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.
- Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en troqueladoras o cortadoras.
También existen las clases E y F, llamados motores de inducción de arranque suave, pero obsoletos hoy en día.
DISEÑO CLASE D.
- También conocidos como de alto par y alta resistencia.
- Alto par de arranque (275% o más del nominal) y baja corriente de arranque.
- Alto deslizamiento a plena carga.
- La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.
- Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en troqueladoras o cortadoras.
También existen las clases E y F, llamados motores de inducción de arranque suave, pero obsoletos hoy en día.
Circuito equivalente
Circuito equivalente de la máquina de inducción.
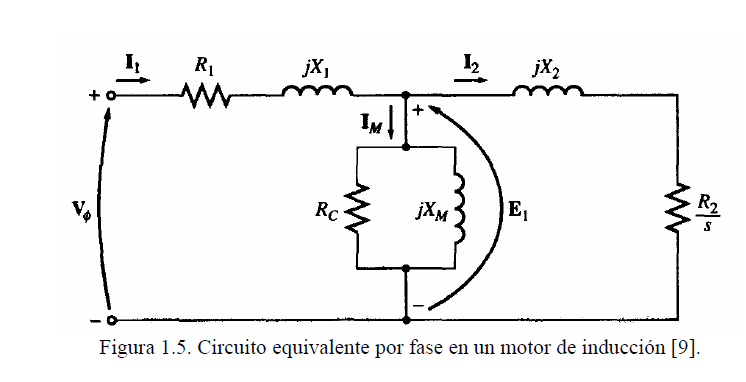
El circuito equivalente de un motor de inducción es muy similar al de un transformador, debido a la acción de transfomación que ocurre al inducirse corrientes en el rotor, desde el estator.
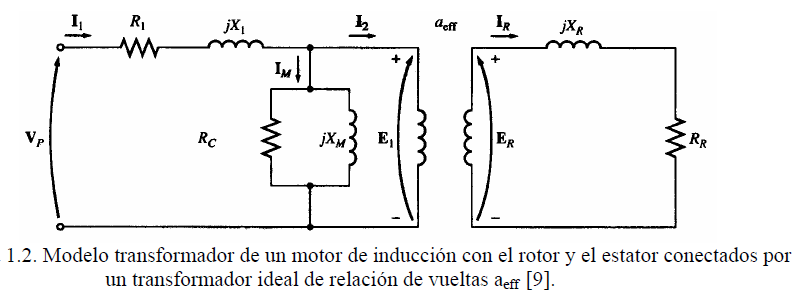
El modelo transformador de un motor de inducción.
En la figura se muestra un circuito equivalente transformador, por fase, de un motor de inducción. La resistencia del estator es R1 y la reactancia de dispersión es X1. E1 es el voltaje primario del estator, acoplado al secundario ER mediante un transformador ideal con relación de vueltas aeff. El voltaje ER producido en el rotor ocasiona un flujo de corriente en el rotor. RC es el componente de pérdidas en el núcleo y jXM se refiere a la reactancia de magnetización, RR y jXR son las impedancias del rotor. Asimismo, I1 constituye la corriente de línea, IM la corriente de magnetización. IR es el flujo de corriente en el rotor e I2 es la corriente rotórica.
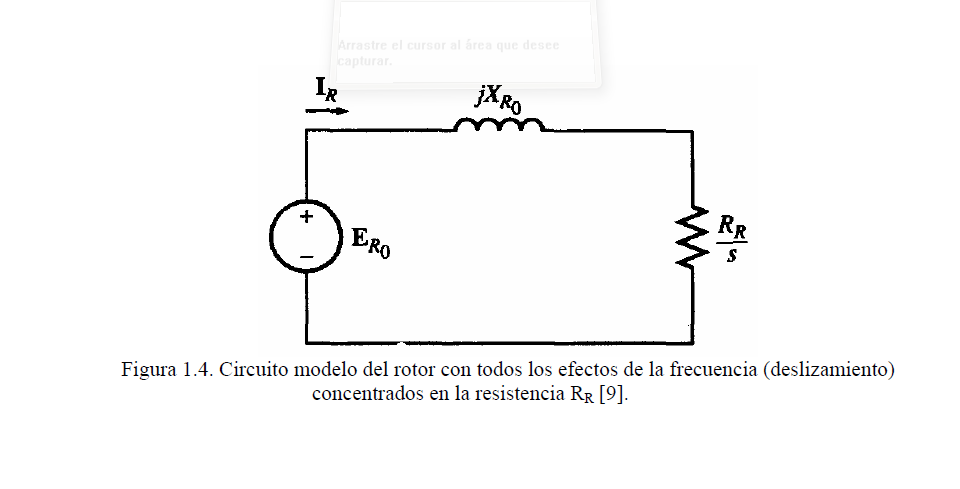
Circuito modelo del rotor.
Cuanto mayor sea el movimiento relativo entre los campos magnéticos del rotor y del estator, mayor será el voltaje resultante en el rotor y la frecuencia del rotor. El mayor movimiento relativo ocurre cuando el rotor se encuentra estacionario, condición llamada de rotor detenido o de rotor bloqueado, de modo que en esta condición se inducen el máximo voltaje y la máxima frecuencia del rotor. El mínimo voltaje (0 V) y la mínima frecuencia (0 Hz) ocurren cuando el motor se mueve con la misma velocidad que el campo magnético del estator, caso en que no hay movimiento relativo.
El voltaje y la frecuencia del rotor son directamente proporcionales al deslizamiento del rotor, por lo que el voltaje y la frecuencia inducidos para cualquier deslizamiento son:
en donde ER0 es el voltaje a rotor bloqueado, s es el deslizamiento y fe es la frecuencia de línea.
La reactancia del rotor (XR) no es constante como lo es la resistencia (RR); por lo que depende de la inductancia (LR), de la frecuencia ( ) r
ω y de la corriente del rotor:

en donde XR0 es la reactancia a rotor bloqueado

El flujo de
corriente en el rotor se calcula como

De esta última ecuación, es posible calcular la impedancia equivalente del rotor; desde el punto de vista de que se encuentra alimentada por la fuente de voltaje ER0:
para obtener el circuito equivalente del rotor en el que el voltaje ER0 es constante y la impedancia del rotor contiene todos los efectos de la variación del deslizamiento
Circuito equivalente final.
Para obtener el circuito equivalente por fase, es necesario referir en el estator, el modelo del rotor. Si la relación de vueltas de un motor de inducción es aeff, el voltaje transformado es:
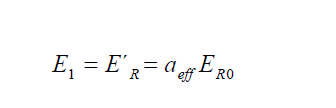
y la corriente e impedancia rotóricas son:
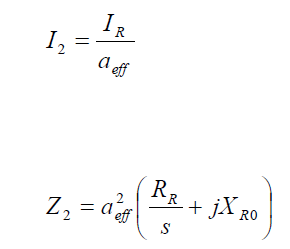
y si se definen:

Pérdidas en un motor de Inducción
Dado que la velocidad n del rotor es inferior a la velocidad sincrónica ns del campo rotativo por el valor del deslizamiento s, la potencia mecánica P2 del rotor también es inferior a la potencia del campo rotativo PD transmitida eléctricamente. La diferencia PVR se pierde en el rotor en forma de calor. En consecuencia, estas pérdidas en el bobinado dependen directamente del deslizamiento
s. Desde el primer momento del proceso de arranque, toda la potencia inducida en el rotor se convierte en calor.

La ecuación muestra que el peligro térmico es mayor para un rotor estacionario con s = 1, ya que toda la potencia de entrada eléctrica se convierte en disipación de calor en el motor. Debido a la elevada intensidad del arranque de los motores de inducción, el calor disipado es múltiplo de la potencia nominal del motor.
Asimismo, los motores autoventilados convencionales no proporcionan una refrigeración adecuada cuando se detienen.
Si analizamos todas las pérdidas de potencia Pv de un motor, como muestra la encontramos las siguientes pérdidas individuales:
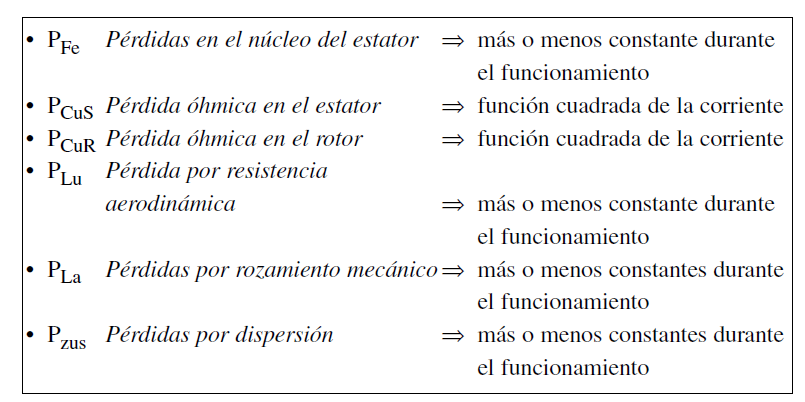
La pérdida en el núcleo del estator PFe se debe a las pérdidas por histéresis y por corrientes parásitas que dependen de la tensión y la frecuencia. En el rotor, las pérdidas son insignificantes debido a la baja frecuencia de la corriente del rotor durante el funcionamiento. Las pérdidas óhmicas se originan en el estator y el rotor. Ambas son una función cuadrada de la carga. Las pérdidas por resistencia aerodinámica y por rozamiento mecánico también son constantes debido a la velocidad de funcionamiento prácticamente constante. Las pérdidas por dispersión son originadas principalmente por las corrientes parásitas de los componentes metálicos de la máquina.
referencias:
https://dhramosfigueroa.files.wordpress.com/2014/02/mc3a1quinas-elc3a9ctricas-3ra-edicic3b3n-stephen-chapman.pdf
http://www.die.eis.uva.es/~daniel/docencia/te/motores_induccion.pdf
http://www-app.etsit.upm.es/departamentos/teat/asignaturas/lab-ingel/motor%20asincrono%20trifasico.pdf
http://catarina.udlap.mx/u_dl_a/tales/documentos/lep/salvatori_a_m/capitulo2.pdf
http://prof.usb.ve/jmontene/pdf/MA.pdf
http://personales.unican.es/rodrigma/PDFs/asincronas%20caminos.pdf
No hay comentarios.:
Publicar un comentario