Definición: por máquina síncrona se entiende los convertidores electromecánicos rotativos que, girando a una velocidad constante proporcional a la frecuencia del sistema eléctrico, transforma energía mecánica en energía eléctrica, bajo la forma de corrientes alternas, o viceversa, la energía eléctrica de corrientes alternas en energía mecánica.
La máquina síncrona está compuesta básicamente de una parte activa fija que se conoce como inducido o estator y de una parte giratoria coaxial que se conoce como inductor o rotor. El espacio comprendido entre el rotor y el estator, es conocido como entrehierro. Esta máquina tiene la particularidad de poder operar ya sea como generador o como motor. Su operación como alternador se realiza cuando se aplica un voltaje de c-c en el campo de excitación del rotor y a su vez éste es movido o desplazado por una fuente externa, que da lugar a tener un campo magnético giratorio que atraviesa o corta los conductores del estator, induciendo se con esto un voltaje entre terminales del generador Su operación como motor síncrono se realiza cuando el estator es alimentado con un voltaje trifásico de c.-a y consecutivamente el rotor es alimentado con un voltaje de c-c.
Características constructivas:
Las máquinas síncronas poseen componentes muy similares que las de inducción entre estas se encuentran:
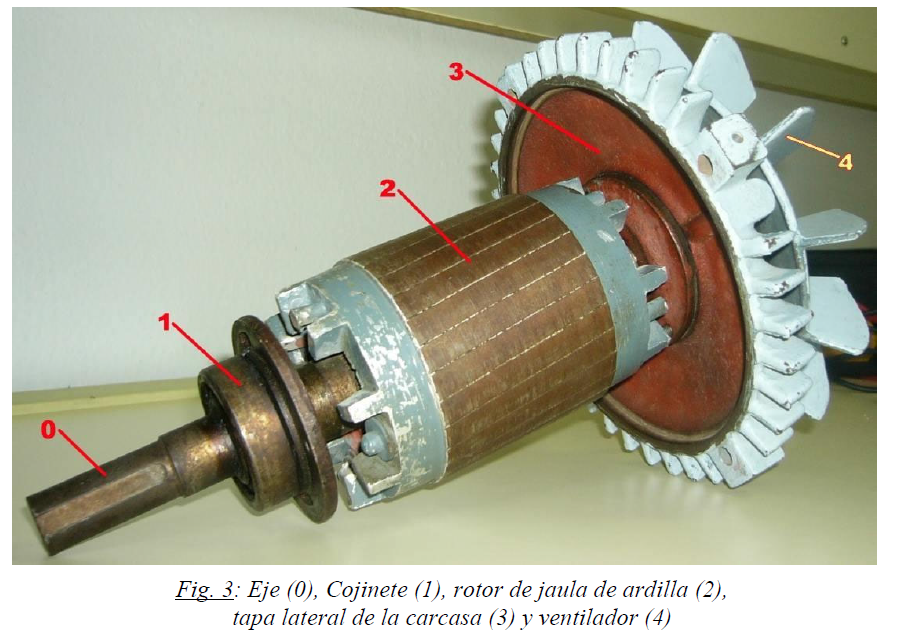
El rotor
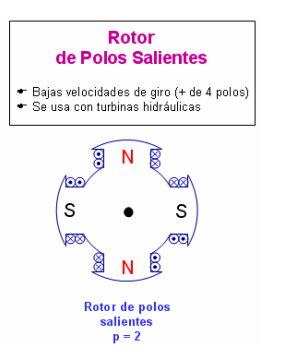
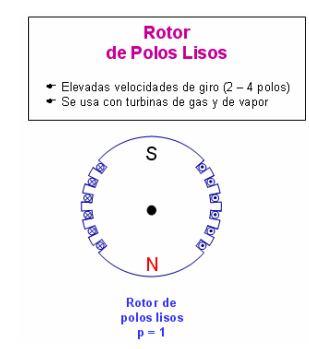
El rotor de un generador síncrono es un gran electroimán y los polos de éste pueden ser construidos de formas salientes o no salientes, dependiendo del tipo de aplicación donde se requiere. Los rotores de polos no salientes (Lisos) se utilizan en rotores de dos y cuatro polos, mientras que los rotores de polos salientes se utilizan en rotores de cuatro o más polos. Puesto que rotor está sujeto a campos magnéticos variables, se construye con láminas delgadas agrupadas para reducir las pérdidas por corrientes parásitas.
El rotor, a diferencia de las máquinas asíncronas gira sin deslizamiento a la velocidad del campo giratorio.
Se debe suministrar un corriente c-d al circuito de campo del rotor. Puesto que el rotor está girando, se requiere un arreglo especial para entregar potencia c-d a sus devanados de campo. Existen dos maneras comunes de suministrar potencia de corriente directa al devanado de campo y son:
a).- Suministrando potencia de c-d desde una fuente externa hacia el rotor por medio de escobillas y anillos rozantes.
b).- Suministrando potencia de c-d desde una fuente especial montada directamente en el eje del generador síncrono
El estator:
El estator consta de una carcasa, un circuito magnético constituido generalmente por unas láminas de acero y un bobinado trifásico similar al de un motor asíncrono alimentado en corriente alterna trifásica para producir un campo giratorio.
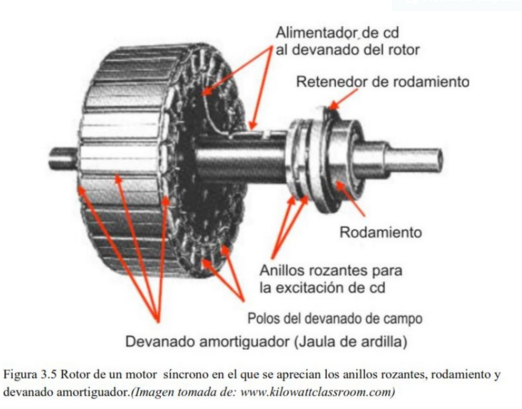
El devanado amortiguador: Se utiliza para arrancar el motor y para evitar las oscilaciones de velocidad bajo carga
Escobillas: La función de las escobillas es transmitir la tensión y corriente de la fuente de alimentación hacia el colector y, por consiguiente, al bobinado del rotor.
Portaescobillas: La función del portaescobillas es mantener a las escobillas en posición de contacto firme con los segmentos del colector.
Dispositivos auxiliares para el arranque del motor
Interruptor y resistencia de descarga: Son elementos utilizados para proteger el devanado polar contra las altas tensiones inducidas ( Por transformación ) por el devanado principal o de estator durante el arranque, así como de las autoinducidas en el devanado de campo cuando se desconecta la fuente de excitación.
Reóstato de campo: Este dispositivo se utiliza para variar la corriente del circuito de campo. Los cambios de corriente de campo afectan la fuerza del campo magnético establecido por el rotor giratorio de campo. Las variaciones de la fuerza del campo del motor no afecta la velocidad del motor, puesto que este último seguirá funcionando a velocidad constante: Sin embargo, los cambios en la excitación del campo de c-c cambiarán el factor de potencia del motor sincrónico.
Funcionamiento:
El motor síncrono recibe este nombre debido a que el rotor gira a la misma velocidad que el campo magnético del estator, es decir, están sincronizados.
El motor síncrono es en esencia un alternador trifásico que funciona a la inversa. Los imanes del campo se montan sobre un rotor y se excitan mediante corriente continua, y las bobinas de la armadura están divididas en tres partes y alimentadas con corriente alterna trifásica.

Para entender el concepto básico de un motor sincrónico. véase la figura siguiente, que muestra un motor sincrónico de dos polos. La corriente de campo If del motor produce un campo magnético de estado estacionario BR, Un conjunto trifásico de voltajes se aplica al estator de la máquina. Que produce un flujo de corriente trifásica en los devanados.

El conjunto trifásico de corrientes en el devanado inducido produce un campo magnético uniforme rotacional Bs. Entonces, hay dos campos Magnéticos presentes en la máquina, y el campo rotórico tenderá a alinearse con el campo estatórico así como dos barras magnéticas tenderán a alinearse si se colocan una cerca de la otra. Puesto que el campo magnético del estator es rotante, el campo magnético del rotor (y el rotor e mismo) tratará constantemente de emparejarse con él. Cuanto mayor sea el ángulo entre los campos magnéticos (hasta cierto máximo), mayor es el par sobre el rotor de la máquina. El principio básico de operación del motor sincrónico es que el rotor "persigue" el campo magnético rotante del estator alrededor de un círculo, sin emparejarse del todo con él.

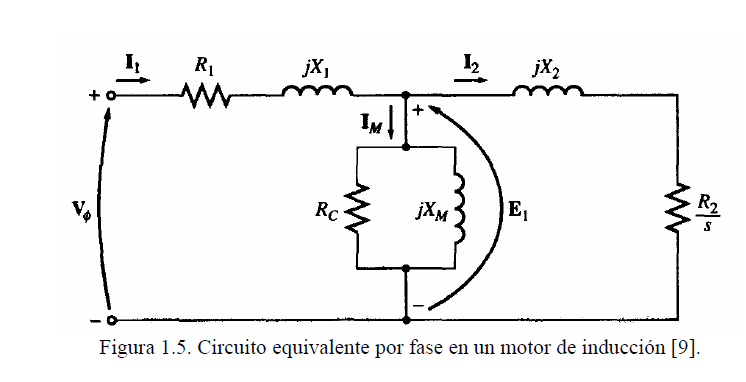
Circuito equivalente por fase de un motor síncrono
El circuito equivalente por fase de un motor sincrónico es exactamente igual al del generador sincrónico, excepto que la dirección de referencia de IA está invertida. Debido al cambio de dirección de IA, la ecuación correspondiente a la ley de voltajes de Kirchhoff cambia para el circuito equivalente de un motor síncrono

Curvas V de motores síncronos:
Las curvas V tal como lo dice el nombre, es una representación gráfica de la conducta de la maquina síncrona, que dice como es la corriente de armadura a una determinada corriente de excitación, manteniendo constante un parámetro de carga al eje, es como una función de 2 variables en la cual se mantiene constante una de ellas, el resultado de la gráfica es la forma de una V. Las curvas V son ampliamente utilizadas para estudiar la estabilidad dinámica de los motores síncronos, determinar la reactancia sincrónica de una manera indirecta y de evaluar las condiciones de adelanto y atraso o sub excitación y sobre-excitación de la inyección de reactivos y corrección del factor de potencia con respecto a un sistema eléctrico.
Curva característica de par-velocidad en el motor sincrónico
Los motores sincrónicos suministran potencia a cargas que son básicamente dispositivos de velocidad constante. Al estar conectados a sistemas de potencia mucho más grandes que los motores individuales, los sistemas de potencia aparecen como barrajes infinitos frente a los motores. Esto significa que el voltaje en los terminales y la frecuencia del sistema serán constantes, independientemente de la cantidad de potencia tomada por el motor. La velocidad de rotación del motor está asociada a la frecuencia eléctrica aplicada, de modo que la velocidad del motor será constante, independientemente de la carga. La curva característica resultante par-velocidad se muestra en la siguiente figura.
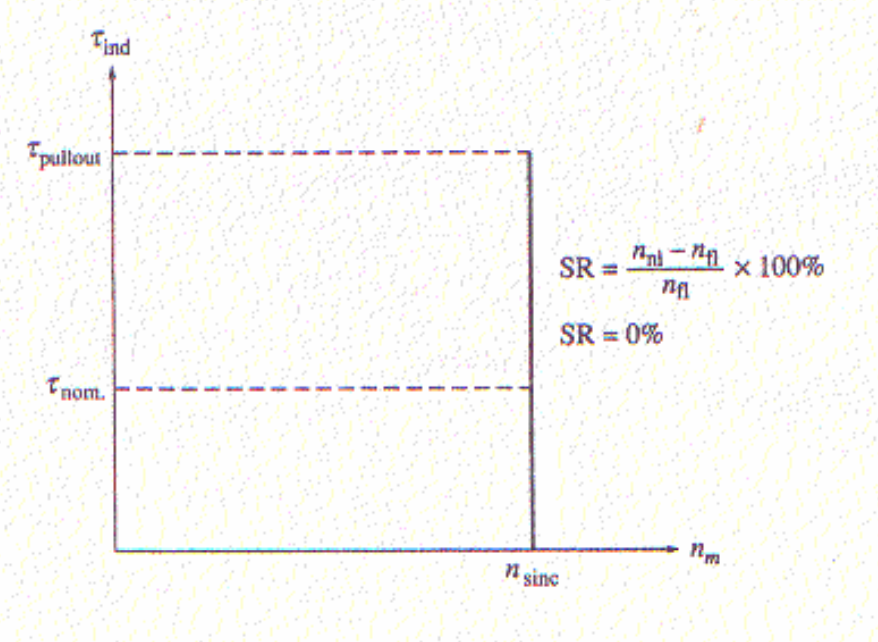
La velocidad de estado estacionario del motor es constante desde vacío hasta el par máximo que puede suministrar el motor, tal que la regulación de velocidad de este motor es 0%. La ecuación del par es:

El par máximo ocurre cuando δ = 90°. Sin embargo, los pares normales de plena carga son mucho menores que aquéllos. En efecto, el par máximo puede triplicar el par de plena carga de la máquina.
Cuando el par aplicado en el eje de un motor sincrónico excede el par máximo, el rotor no puede permanecer más enlazado a los campos magnéticos estatórico y neto. En cambio, el rotor comienza a disminuir la velocidad frente a ellos. Como el rotor disminuye la velocidad, el campo magnético estatórico se entrecruza con él repetidamente, y la dirección del par inducido en el rotor se invierte con cada paso. El enorme par resultante oscila primero en una forma y luego en otra causando que el motor entero vibre con fuerza. La pérdida de sincronización después que se ha excedido el par máximo, se conoce como deslizamiento de polos.
El par máximo del motor está dado por:

El campo magnético neto es el vector suma de los campos del, rotor y el estator
Estas ecuaciones indican que cuanto mayor sea la corriente de campo (y por tanto EA), mayor será el máximo par del motor. Por tanto, hay una ventaja en la estabilidad, si se opera el motor con una gran corriente de campo o un gran EA.

Efecto de los cambios de carga en un motor sincrónico
Si se fija una carga al eje de un motor sincrónico, éste desarrollará suficiente par para mantenerse girando a la velocidad sincrónica junto con su carga. ¿Qué ocurre en un motor sincrónico cuando la carga cambia?
Para responder este interrogante es preciso examinar un motor sincrónico que opera inicialmente con un factor de potencia en adelanto, como se muestra en la siguiente figura Si la carga sobre el eje del motor se incrementa, el rotor disminuirá su velocidad al comienzo. Cuando eso ocurre, el ángulo de par δ llega a ser mayor, y aumenta el par inducido. Con el tiempo, el incremento del par inducido acelera el rotor y el motor gira de nuevo con velocidad sincrónica, pero con un ángulo de par δ mayor.
¿Qué apariencia toma el diagrama fasorial durante este proceso ? Para responder este interrogante es necesario examinar las restricciones sobre la máquina durante un cambio de carga. La figura “a” muestra el diagrama fasorial del motor antes que se incrementen las cargas. El voltaje interno generado EA es igual a KΦω y por tanto, depende sólo de la corriente de campo y de la velocidad de la máquina. La velocidad está restringida a permanecer constante debido a la fuente de potencia de entrada y, puesto que no se ha tocado el circuito del campo, la corriente de campo también es constante. Entonces EA debe ser constante cuando cambia la carga. Las distancias proporcionales a la potencia (EAsenδ e IA cosθ ) se incrementarán, pero la magnitud de EA debe permanecer constante. Cuando la carga se incrementa, E A se mueve hacia abajo, como se observa en la figura b. Como EA se mueve hacia abajo cada vez más, la cantidad jXsIA debe incrementarse para alcanzar desde la punta de EA a VΦ, y entonces la corriente del inducido IA también se incrementa. Nótese que el ángulo θ del factor de potencia también cambia, y es cada vez menor cuando está en adelanto y luego cada vez mayor cuando está en atraso.

Tipos de arranques de un motor síncrono.
Existen tres métodos básicos para el arranque seguro de un motor sincrónico.
Arranque del motor reduciendo la frecuencia eléctrica
Reducir la velocidad del campo magnético del estator a un valor suficientemente bajo para que el rotor pueda acelerar y se enlace con él durante medio ciclo de rotación del campo magnético. Esto se puede llevar a cabo reduciendo la frecuencia de la potencia eléctrica aplicada.
Arranque del motor mediante un motor primario externo
El segundo método para arrancar un motor sincrónico consiste en fijarle un motor externo de arranque y llevar la máquina sincrónica hasta su velocidad plena con ese motor.. Entonces la máquina sincrónica puede ser emparalelada con un sistema de potencia como un generador, y el motor de arranque puede desacoplarse del eje de la máquina. Desconectando el motor de arranque, el eje de la máquina se desacelera, el campo magnético del rotor BR queda atrás de Bnet y la máquina sincrónica comienza actuar como motor.
Arranque de un motor utilizando devanado amortiguador
La técnica más popular para el arranque de motores sincrónicos es utilizar devanados amortiguadores: Estos devanados son barras especiales dispuestas en ranuras labradas en la cara del rotor del motor sincrónico y cortocircuitadas en cada extremo por un anillo de cortocircuito.
Estos devanados tienen dos objetivos:
a).- Hacer que el motor arranque como un motor de inducción
b).- Impedir la oscilación de velocidad o penduleo
El penduleo es una fluctuación o variación periódica de la velocidad del rotor con respecto a la del campo magnético rotatorio del estator y puede ser producido por los siguientes aspectos
1.- Un cambio brusco de carga mecánica.
2.- Un cambio brusco de la tensión de c-a
3.- Un cambio brusco de la excitación o intensidad de c-c
Ventajas del motor síncrono:
1.- Velocidad constante
2.- Factor de potencia ajustable
El factor de potencia se controla variando la excitación del rotor y puede ser del 100% o unitaria con la excitación normal, de corriente atrasada con subexcitación y de corriente adelantada con sobreexcitación
EL motor corrige el F.P de un sistema porque cuando se le sobreexcita su estator toma corriente adelantada que neutraliza o compensa la corriente atrasada que toman los aparatos inductivos conectados al mismo sistema.

Esquema de motor síncrono para corregir factor de potencia de un sistema
Principio de funcionamiento del motor síncrono con devanado amortiguador
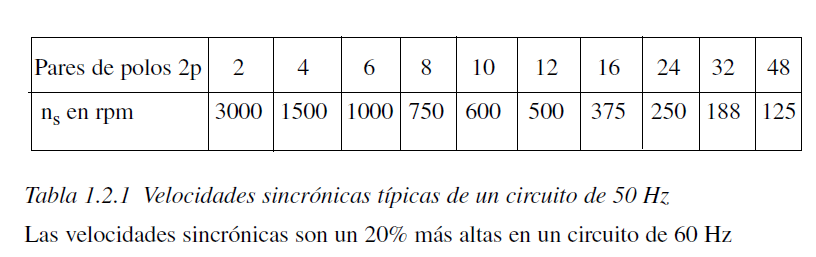
Cuando el voltaje trifásico de régimen se aplica a los devanados del estator, se establece un campo magnético giratorio que se mueve a velocidad sincrónica, establecida por los devanados del estator, la que depende de la frecuencia del voltaje trifásico y del número de polos de estator: La velocidad sincrónica del campo de un estator se calcula por medio de la fórmula:

El campo magnético, establecido por los devanados del estator, al girar a velocidad sincrónica, corta a través del devanado en jaula de ardilla del rotor y hace que se induzcan voltaje corriente en las barras de este devanado. El campo magnético del devanado amortiguador o de caja de ardilla así establecido reacciona con el campo del estator en tal forma que hace que el rotor gire.

El rotor aumentará su velocidad hasta un punto ligeramente por debajo de la velocidad sincrónica del estator. Dicho en otras palabras, hay un ligero resbalamiento del rotor que lo devuelve al campo magnético establecido por el estator. Por lo tanto, el motor se ha puesto en marcha igual que lo hace un motor con inducido en jaula de ardilla. A continuación el circuito de campo se excita desde una fuente exterior de corriente continua y en los núcleos de campo del rotor se establecen polos magnéticos fijos. Los polos magnéticos del motor son atraídos a los polos magnéticos contrarios del campo magnético establecido por el estator.
El rotor aumentará su velocidad hasta un punto ligeramente por debajo de la velocidad sincrónica del estator. Dicho en otras palabras, hay un ligero resbalamiento del rotor que lo devuelve al campo magnético establecido por el estator. Por lo tanto, el motor se ha puesto en marcha igual que lo hace un motor con inducido en jaula de ardilla.
A continuación el circuito de campo se excita desde una fuente exterior de corriente continua y en los núcleos de campo del rotor se establecen polos magnéticos fijos. Los polos magnéticos del motor son atraídos a los polos magnéticos contrarios del campo magnético establecido por el estator.
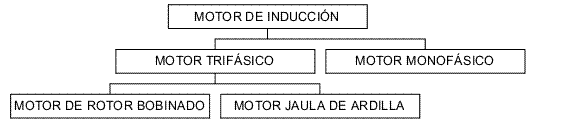
Clasificación de la máquina síncrona:
Según el número de fases del devanado inducido se pueden clasificar en:
Monofásicas y polifásicas (generalmente trifásicas)
Según la forma constructiva del sistema inductor:
Máquinas de rotor de polos salientes, disposición constructiva propia de máquinas de baja velocidad, hasta de 1000 r.p.m en las potencias mayores. Cuando actúa como generador también se le denomina alternador hidráulico.

Máquinas de rotor cilíndrico o de polos lisos: exclusivamente empleado en máquinas de alta velocidad y elevada potencia, cuando está acoplado a una turbina de vapor se le conoce como turbo alternador.
Finalmente, según el tipo de su sistema inductor se clasifican en:
Máquinas heteropolares, en las cuales las bobinas del inducido son conectadas por flujos alternativamente de sentidos contrarios (polaridades norte y sur).
Máquinas homopolares: en las que las bobinas concatenan siempre un flujo del mismo sentido, cuya magnitud fluctúa entre un máximo y un mínimo que pueden llegar a ser nulo pero nunca en sentido opuesto.
Sistema de enfriamiento.
Generadores enfriados por aire: Estos generadores se dividen en dos tipos básicos: abiertos ventilados y completamente cerrados enfriados por agua a aire.
Los generadores de tipo OV fueron los primeros construidos, el aire en este tipo de generadores pasa sólo una vez por el sistema y considerable cantidad de materias extrañas que pueden acumularse en las bobinas, interfiriendo la transferencia de calor y afectando adversamente al aislamiento. Los generadores tipo TEWC, son un sistema de enfriamiento cerrado, donde el aire re circula constantemente y se enfría pasando a través del tubo del enfriador, dentro de los cuales se hace pasar agua de circulación. La suciedad y materias extrañas no existen en el sistema, y puesto que se tiene agua de enfriamiento disponible, la temperatura del aire puede mantenerse tan baja como se desee.
Generadores enfriados por hidrógeno: Los generadores de mayor capacidad, peso, tamaño y los más modernos, usan hidrógeno para enfriamiento en vez de aire en circuito de enfriamiento cerrado. El enfriamiento convencional con hidrógeno puede usarse en generadores con capacidad nominal aproximada de 300 MVA. 3. Generadores enfriados por hidrógeno / agua: Pueden lograrse diseños de generadores aún más compactos mediante el uso de enfriamiento con agua directo al devanado de la armadura del generador. Estos diseños emplean torones de cobre a través de los cuales fluye agua desionizada. El agua de enfriamiento se suministra vía un circuito cerrado.
Aplicaciones
En la operación como generador desacoplado de la red, la frecuencia de las corrientes generadas depende directamente de la velocidad mecánica del eje. Esta aplicación ha sido particularmente relevante en el desarrollo de centrales de generación a partir de recursos renovables como la energía eólica. Las máquinas sincrónicas también se emplean como motores de alta potencia (mayores de 10.000 [HP]) y bajas revoluciones. Un ejemplo particular de estas aplicaciones es al interior de la industria minera como molinos semiautógenos (molinos SAG) o como descortezadores de la industria maderera. Adicionalmente a la operación como motor y generador, el control sobre la alimentación del rotor hace que la máquina sincrónica pueda operar ya sea absorbiendo o inyectando reactivos a la red en cuyo caso se conocen como reactor o condensador sincrónico respectivamente. Particularmente esta última aplicación es utilizada para mejorar el factor de potencia del sistema eléctrico el cual tiende a ser inductivo debido a las características típicas de los consumo.
Conexión en bus infinito de generadores síncronos
El bus infinito es una idealización de un sistema de potencia, el cual es tan grande que en él no varían ni el voltaje ni la frecuencia, siendo inmaterial la magnitud de las potencias activas o reactivas que se toman o suministran a él. Puede pensarse en el bus infinito como una súper máquina equivalente de dimensiones descomunales, que nada que se haga sobre él puede causarle mucho efecto.
La súper máquina anterior es el equivalente inercial y eléctrico de todos los generadores conectados a él la siguiente imagen muestra un ejemplo de conexión en bus infinito
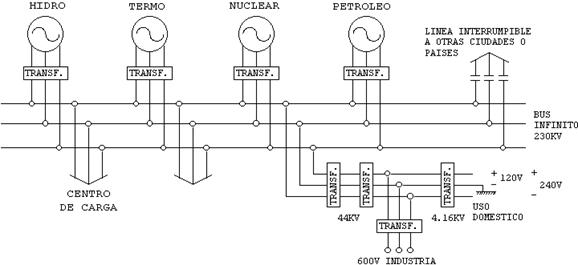
La transmisión de potencia se hace normalmente con altos voltajes (cientos de KV), para reducir pérdidas. Sin embargo la generación se realiza a menores voltajes (20-30 KV). Se usan transformadores para cambiar los niveles de voltaje. Se usa uno para elevar el voltaje de generación hasta el bus infinito y las cargas reciben de él energía con un nivel de voltaje reducido por varias etapas de transformadores.
En las plantas generadoras, los generadores sincrónicos son conectados y desconectados, dependiendo de la demanda de energía en el bus infinito. La operación de conectar un generador sincrónico al bus infinito es conocida como sincronización con el bus infinito.
http://es.slideshare.net/LuisZhunio/partes-de-la-mquina-sncrona
http://emadrlc.blogspot.mx/2012/07/generator-types.html
http://electricidad.utpuebla.edu.mx/Manuales%20de%20asignatura/5to%20cuatrimestre/Maquinas%20sincronas%20y%20de%20cd.pdf